
Los robots industriales, usados principalmente en la manufactura y que en su mayoría son brazos robotizados estacionados en un solo lugar, se introdujeron en las fábricas durante el decenio de los sesenta. La figura 7 muestra estos robots en una fábrica de automóviles.
Así como se incorporaron a la vida cotidiana televisores, radios, computadoras y otras máquinas, los robots de servicio (figura 8) también lo harán en algún momento. Uno de ellos se dedicará a cortar el pasto, mientras otro realizará funciones de vigilancia. Dentro de la casa se tendrán robots pequeños que limpien, planchen y doblen la ropa, entre muchas otras funciones.
En la figura 9 se muestra el robot de servicio Asimo, fabricado por la compañía japonesa Honda, y en la figura 10 se muestra al robot TPR8, desarrollado en el laboratorio de Bio-Robótica de la Facultad de Ingeniería de la Universidad Nacional Autónoma de México.
La computación se encuentra en diversos niveles cuando se relaciona con la robótica. Por ejemplo, TPR8 utiliza el sistema ViRbot, que permite probar algoritmos para robots de servicio. Se mencionarán algunas de las partes más interesantes:
Curiosidades
Se espera que en el futuro aumente la demanda masiva de los ahora llamados robots de servicio, cuyo objetivo es simplificar el trabajo humano en casas, oficinas, tiendas, etc. Este tipo de robots son dispositivos ambulantes programables que ofrecen servicios en forma automática o semiautomática.
Concepto
Los robots de servicio son sistemas de software y hardware que consisten en una serie de dispositivos electrónicos y electromecánicos que se ubican en ambientes dinámicos y complejos. Todas estas características les dan una cierta autonomía, que les permite tomar decisiones a partir de una representación interna del mundo. Así, los robots deben tener dos capacidades básicas: adaptabilidad, para reaccionar en forma oportuna y apropiada a sucesos imprevistos, modificadores de su medio, y determinación para escoger las acciones apropiadas para lograr sus objetivos.
Curiosidades
TPR8 fue diseñado para competir en RoboCup, una competencia mundial cuyo objetivo es que en el año 2050 el campeón del mundo de futbol tenga un partido con el campeón del mundo de futbol del representativo de robots y que éstos ganen el partido. Para lograr este objetivo, cada año se realiza esta competencia con diferentes categorías. En la categoría denominada Junior, participan jóvenes entre 12 y 19 años, los cuales compiten con sus robots en pruebas de futbol y de rescate, en donde los robots realizan actividades en lugares dañados por desastres naturales, como terremotos.


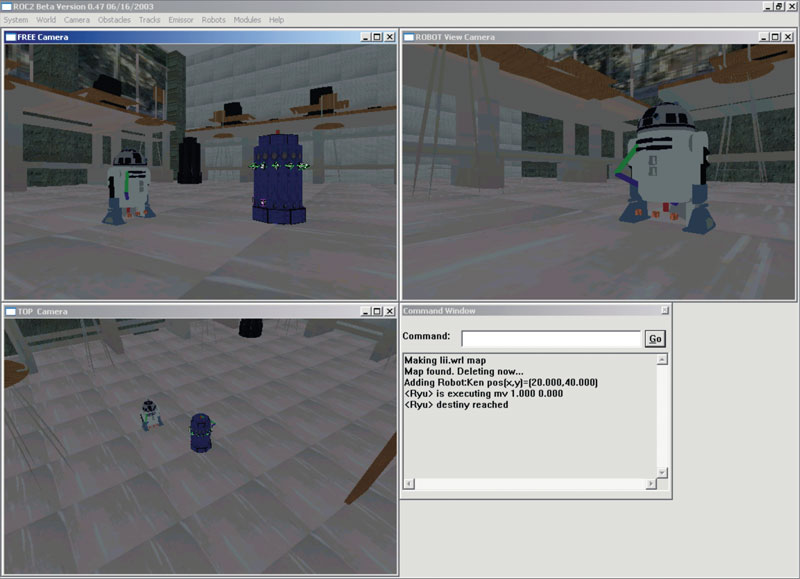
Una interfaz gráfica de tres dimensiones, la cual utiliza técnicas de graficación para poder representar objetos de tres dimensiones en monitores planos, permite visualizar diversos robots virtuales, que son una simulación veraz de los reales: pueden aparentar las mismas órdenes, con ligeras variaciones (véase la figura 11).
Concepto
En temas anteriores se han evaluado distintas técnicas de búsquedas básicas en inteligencia artificial. Por ejemplo, para generar (y resolver) el problema de laberintos perfectos, en el tema sobre programación se utilizó la búsqueda a profundidad. Ésta y muchas otras desarrolladas a lo largo de los años, permiten seleccionar la ruta más adecuada entre conjuntos muy grandes de opciones. Estas búsquedas se dividen en dos: búsquedas ciegas o de fuerza bruta, como la búsqueda a profundidad o amplitud, y las búsquedas heurísticas: escalada simple, máxima pendiente, minimax, alfa-beta, etcétera.
Mientras un robot utiliza sensores internos y externos para captar su entorno, en el robot virtual se utilizan modelos matemáticos para simular el entorno.
A lo largo del día, el robot debe realizar diversas tareas de acuerdo con la hora de su programación. En este camino, es muy importante la interacción con los humanos para que los robots sean capaces de reconocer en forma natural las órdenes dadas por una persona.
El robot obtiene una representación simbólica de los datos que vienen de los sensores, de las tareas del robot y de la interfaz hombre-robot. Con esa representación simbólica se genera una creencia. En la figura 12, la representación simbólica genera dos postulados dudosos: hay un agujero adelante del robot o hay una sombra enfrente de él. ¿Qué debe hacer el robot? Si, en efecto, hay un agujero enfrente no debe avanzar o caerá en él. Es fácil ver que el robot requiere de más información; usualmente estos sistemas incluyen mapas del medio ambiente y alguna manera de localizar su posición en estos mapas.
Una vez que el robot obtiene toda la información posible de sus sensores, de su posición, etc., entonces debe decidir un curso de acción. Para simular razonamiento, se utilizan diversas técnicas de inteligencia artificial y, dado un cierto conjunto de valores de entrada, localiza y realiza la acción más apropiada. En el ejemplo del robot frente a la sombra, una vez que determina que en efecto es una sombra, entonces selecciona la acción de proseguir el camino.
Sin embargo, para poder convivir con los seres humanos, un robot debe tener dos capacidades más: corregir sus errores y aprender cosas nuevas. En la actualidad existen varios métodos para que los sistemas artificiales aprendan, como son los algoritmos genéticos, las redes bayesianas, neuronales y artificiales, así como la programación genética.

Curiosidades
Existen pequeños robots que vuelan, como si fueran moscas. En su artículo "Fly, Robot Fly", Robert Wood describe este tipo de robots miniatura que vuelan todavía a nivel de prototipos, pero que tendrán un número considerable de aplicaciones: en operaciones de búsqueda y rescate, en ambientes inhóspitos para el hombre, en exploración y monitoreo, en inspección de construcciones y otras.